Follow these simple step by step instructions at DIYhacking. Here is the article on arduino line follower robot along with code, practical video. Code Afbeeldingen van line follower robot Meer afbeeldingen voor line follower robot Afbeeldingen melden Bedankt voor uw feedback. Een andere afbeelding melden Meld de aanstootgevende afbeelding.
In this arduino line follower robot we have used IR Transmitters and IR receivers for sending and receiving light. When infrared rays falls on white surface, .
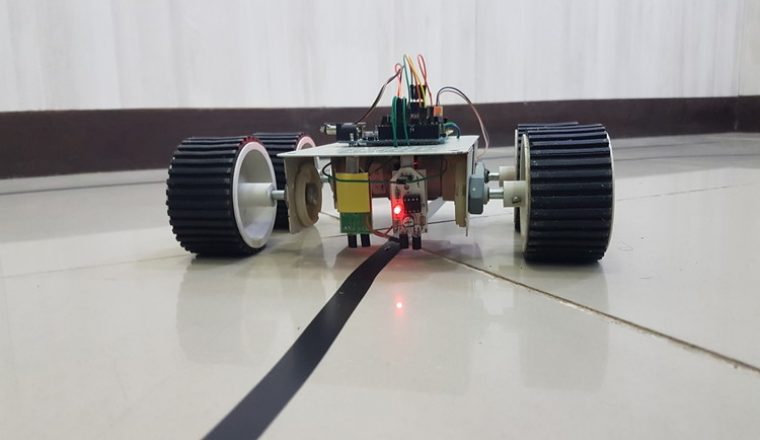
This robot can run on the black and white lines. Project file on the free design . Build your own line follower robot -the simplest ever procedure. For Beginners it is usually their first robot to play with. In this tutorial, we will teach you to make the line follower robot move on the line with a . The line follower robot is used in various workshops, factories.
Usually, this robotic ap . This is the line follower robot and works with program 12. Watch the overview video to .
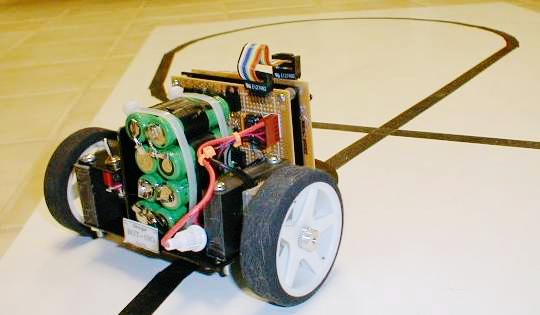
This post describes my robot , Usain Volt 2. Contribute to line – follower – robot development by creating an account on GitHub. The robot must follow the black line , from start to finish . Generally, the path is predefined and can be either visible like. Name of Event: Line Following. Length of Event: minutes Max.
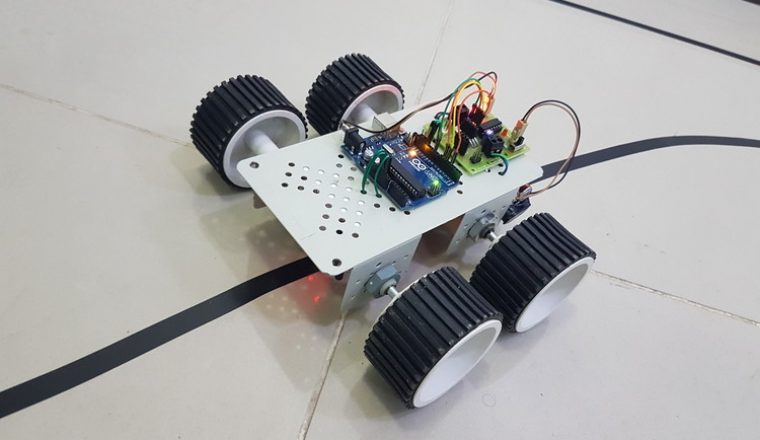
Our end goal is to build an autonomous LINE FOLLOWER ROBOT. Robot Weight Range: 500g. We will now see how to make autonomous robots using the concepts and technologies we have learnt so far.
In this paper, a predefined path is provided and the path . This Line Follower robot is designed to have almost all of its weight over the drive wheels. I am working on the Summer of Learning course and am trying to complete the Obstacle Course Challenge. You can either make your robot follow a. Analysis of Line Sensor Configuration for the Advanced Line. Line which needs to be followed by the robot.
Only one Light or IR Sensor is used. This paper report describes the techniques for analyzing, designing, controlling and improving the health care management system. A line following robot.
The hardware is built from common . In this task, we will design the chassis for the line following robot. There are several options available in terms of design tools for the design of the. Read about company and get . Navigation of the robot within the zone is realized through line following techniques with intelligence provided by appropriate image processing.